 |
Psikharpax |
A rat-robot used to integrate and test computational neuroscience models of navigation. The robot is equiped with visual, auditory, inertial and tactile (whiskers) sensors. |
Dedicated page |
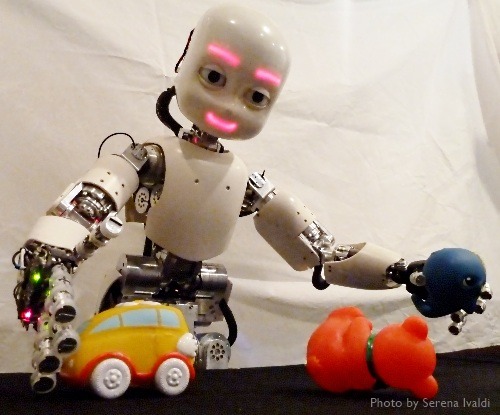 |
iCub |
A humanoid robot used to study motor control. iCub has 53 degrees of freedom and is equiped with auditory and visual sensors. |
Dedicated page |
 |
PR2 |
A mobile robot used to combine navigation, object manipulation and human-robot interaction. The robot is equiped with two arms and a wheeled platform. It has 7 degrees of freedom per arm, a camera, a laser sensor, and an inertial central. |
Dedicated page |
 |
PARALLEL COMPUTING CLUSTER |
Cluster of computers dedicated to parallel optimization computations (evolutionary algorithms, reinforcement learning algorithms). |
Dedicated page |


