


AGATHE
Nos quatre axes de recherche
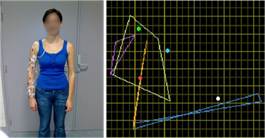
AXE 1 – analyse et modélisation des gestes et des mouvements humains.
AXE 2 – Conception et optimisation de dispositifs en interaction physique
 Pour concevoir des systèmes de comanipulation, qui sont des dispositifs mécatroniques intégrés, il est nécessaire de développer des méthodologies innovantes qui prennent en compte l’interaction avec l’utilisateur dans un processus d’optimisation. Pour cela, nous faisons par exemple appel à la réalité virtuelle afin de tester le comportement en situation d’un prototype virtuel avant de concevoir le prototype physique. Un autre domaine d’intérêt est la conception et à l’instrumentation des interfaces entre l’utilisateur et le robot. Enfin, l’instrumentation intra corporelle pour la chirurgie mini-invasive, qui nécessite l’optimisation des actionnements dans des volumes réduits, est l’une des applications privilégiées de ces travaux.Pour en savoir plus
Pour concevoir des systèmes de comanipulation, qui sont des dispositifs mécatroniques intégrés, il est nécessaire de développer des méthodologies innovantes qui prennent en compte l’interaction avec l’utilisateur dans un processus d’optimisation. Pour cela, nous faisons par exemple appel à la réalité virtuelle afin de tester le comportement en situation d’un prototype virtuel avant de concevoir le prototype physique. Un autre domaine d’intérêt est la conception et à l’instrumentation des interfaces entre l’utilisateur et le robot. Enfin, l’instrumentation intra corporelle pour la chirurgie mini-invasive, qui nécessite l’optimisation des actionnements dans des volumes réduits, est l’une des applications privilégiées de ces travaux.Pour en savoir plus
AXE 3 – Commande pour l’assistance aux gestes par comanipulation
 La commande des systèmes de comanipulation permet de mettre en œuvre diverses fonctions d’assistance : filtrage, guidage, superposition d’efforts virtuels, etc. Elle impose une mesure en temps réel de l’interaction. Nos travaux concernent la commande en efforts, l’asservissement visuel, ou une combinaison de ces approches. Le partage des commandes et la question de l’adaptativité du comportement au sujet sont des questions centrales. Nous les abordons notamment en essayant d’intégrer dans la commande du robot des modèles issus des neurosciences du mouvement. Pour en savoir plus
La commande des systèmes de comanipulation permet de mettre en œuvre diverses fonctions d’assistance : filtrage, guidage, superposition d’efforts virtuels, etc. Elle impose une mesure en temps réel de l’interaction. Nos travaux concernent la commande en efforts, l’asservissement visuel, ou une combinaison de ces approches. Le partage des commandes et la question de l’adaptativité du comportement au sujet sont des questions centrales. Nous les abordons notamment en essayant d’intégrer dans la commande du robot des modèles issus des neurosciences du mouvement. Pour en savoir plus
AXE 4 – Evaluation des systèmes en interaction et applications cliniques.
 Le niveau de performance d’un système interactif n’est pas une propriété intrinsèque qui peut se mesurer simplement : il faut se placer dans une situation réaliste d’usage et comparer les performances gestuelles obtenues avec et sans assistance. Nous travaillons à développer des méthodologies d’évaluation de la performance du geste en contexte de comanipulation, dès le stade de la conception et jusqu’à la preuve de concept en milieu clinique, qui renferme en soi des difficultés particulières.Pour en savoir plus
Le niveau de performance d’un système interactif n’est pas une propriété intrinsèque qui peut se mesurer simplement : il faut se placer dans une situation réaliste d’usage et comparer les performances gestuelles obtenues avec et sans assistance. Nous travaillons à développer des méthodologies d’évaluation de la performance du geste en contexte de comanipulation, dès le stade de la conception et jusqu’à la preuve de concept en milieu clinique, qui renferme en soi des difficultés particulières.Pour en savoir plus